در این مقاله سیزده دلیل اصلی خرابی موتورها ، چگونگی تشخیص و راهکارهای جلوگیری از وقوع این خرابی ها بررسی و تشریح شده است.
چه اقداماتی انجام دهیم و چگونه زمان بهره برداری از تجهیزات را بهبود بدهیم.
موتورها در
محیط های صنعتی در همه جا استفاده می شوند و به طور فزاینده ای در حال
پیچیده و تخصصی تر شدن هستند. نگهداشتن موتورهای در حال کار، در پیک عملکرد
کاری خود، یک چالش جدی است. خیلی
مهم است که به یاد داشته باشیم مشکلات مرتبط با موتور و درایو به یک دلیل
خاص محدود نمی شود – مشکلات الکتریکی و مکانیکی هر دو می توانند باعث خرابی
موتور گردند. مجهز شدن به دانش درست در این زمینه به معنای تفاوت بین از
کار افتادگی های پر هزینه و بهبود زمان بهره برداری از سرمایه ها است.
شکست عایق سیم پیچها و فرسودگی یاتاقان ها دو عامل اصلی و عمده خرابی
موتورها هستند، اما این وضعیتها دلایل مختلفی دارند. این مقاله تشریح می
کند که چگونه 13 مورد از رایج ترین دلایل خرابی عایق سیم پیچی و خرابی
یاتاقانها را پیدا کنیم
کیفیت توان 1- ولتاژ گذرا 2- عدم تعادل ولتاژ 3- اعوجاج هارمونیکی درایوهای فرکانس متغیر 4- بازتابها در سیگنالهای PWM خروجی درایو 5- جریان سیگما 6- اضافه بارهای عملیاتی عوامل مکانیکی 7- نا هم محوری 8- عدم تعادل شفت 9- شل و آزاد بودن شفت 10- فرسودگی یاتاقان عوامل نصب نادرست 11- پایه ضعیف 12- کشیدگی و کرنش لوله 13- ولتاژ شفت
کیفیت توان
1- ولتاژ گذرا

ولتاژهای گذرا می توانند از منابع متعددی
در داخل یا خارج کارگاه بیایند. خاموش یا روشن شدن بارهای مجاور، بانکهای
خازنی اصلاح ضریب توان یا حتی شرایط هوایی محیط میتوانند بر روی سیستم
توزیع ولتاژهای گذرا تولید کنند. این ولتاژهای گذرا، که در دامنه و فرکانس
متغیر هستند، می توانند باعث ایجاد فرسودگی یا شکست عایقی در سیم پیچهای
موتور شوند به دلیل ندرت وقوع و اینکه نشانه های آن ممکن است به روشهای
مختلف ظاهر شوند. یافتن منشائ این ولتاژهای گذرا می تواند مشکل باشد. برای
مثال، یک ولتاژ گذرا ممکن است بر روی کابلهای کنترل ظاهر شود که الزاما
باعث خسارت مستقیم به تجهیزات نشود اما باعث در هم گسیختن عملکرد آنها
گردد.
خرابی مرتبط : شکست عایقی سیم پیچی موتور باعث خرابی زودهنگام موتور و از کار افتادن خارج از برنامه می شود.
تجهیزات برای اندازه گیری و تشخیص: Fluke 435-II آنالایزر کیفیت توان سه فاز وضعیت بحرانی: بالا
2- عدم تعادل ولتاژ

سیستمهای توزیع سه فاز اغلب بارهای تک فاز
را تغذیه می کنند. یک عدم تعادل در امپدانس یا توزیع بار میتواند باعث عدم
تقارن در میان هر سه فاز گردد. عامل بالقوه خرابی می تواند در کابلکشی
موتور، ترمینال موتور یا خود سیم پیچ ها باشد. این عدم تعادل می تواند منجر
به تنش هایی در مدارهای هر فاز در یک سیستم توان سه فاز گردد. در حالت
معمول، ولتاژ هر سه فاز باید همواره در یک اندازه باشند.
خرابی مرتبط : عدم تعادل ولتاژ باعث عبور
جریان اضافه در یک یا بیشتر از فازها شده و در ادامه دمای عملیاتی را
افزایش داده و منجر به شکست عایقی می گردد.
وضعیت بحرانی: متوسط
3- اعوجاج هارمونیکی

شرح ساده این است که هارمونیکها منابع
اضافی ناخواسته ولتاژها یا جریانهای AC فرکانس بالا هستند که انرژی را به
سیم پیچهای موتور اعمال می کنند. این انرژی اضافی جهت گردش شفت موتور
استفاده نمی شود بلکه در سیم پیچها سیرکوله می شود و سرانجام در تلفات
انرژی داخلی موتور مشارکت می کند. این تلفات به صورت حرارت پراکنده می
شوند. که در طی زمان، توانایی عایقی سیم پیچها را تخریب خواهد کرد. مقداری
اعوجاج هارمونیکی جریان در هر بخشی از سیستم که تجهیزات الکترونیکی را
تغذیه می کنند طبیعی است. برای شروع بررسی اعوجاج هارمونیکی، از یک
آنالایزر کیفیت توان برای پایش میزان جریان و حرارت در ترانسفورماتورها
برای اطمینان از اینکه آنها تحت تنش اضافه قرار ندارند استفاده کنید. هر
هارمونیک دارای سطح اعوجاج قابل قبول و متفاوت است که در استانداردهایی
مانند IEEE 519-1992 تعریف شده است.
خرابی مرتبط : کاهش راندمان موتور باعث افزایش هزینه ها و افزایش دمای
عملیاتی می شود. تجهیزات برای اندازه گیری و تشخیص: Fluke 435-II آنالایزر
کیفیت توان سه فاز میزان بحرانی بودن: متوسط
درایوهای فرکانس متغیر
4- بازتابها بر روی سیگنالهای PWM خروجی درایو

درایوهای فرکانس متغیر تکنیک مدولاسیون
پهنای پالس (PWM) را برای کنترل ولتاژ و فرکانس خروجی که به موتور اعمال می
گردد به کار گرفته اند.
بازتابها هنگامی تولید می شوند که یک عدم
انطباق بین امپدانس بار و منبع وجود داشته باشد. عدم تطابق امپدانس می
تواند به دلیل نصب نادرست، انتخاب نادرست اجزا و افت و پیری تجهیزات طی
گذشت زمان رخ دهد. در یک مدار درایو موتور، مقدار پیک بازتاب می تواند به
بزرگی اندازه ولتاژ باس DC باشد.
خرابی مرتبط : شکست عایقی سیم پیچهای موتور باعث از کار افتادن های خارج از برنامه می شود.
تجهیزات برای اندازه گیری و تشخیص: Fluke
190-204 ScopeMeter اسیلوسکوپ 4 کانال قابل حمل با نمونه برداری سریع، تستر
مقاومت عایقی Fluke 1587
میزان بحرانی بودن : زیاد
5- جریان سیگما

جریانهای سیگما ذاتا جریانهای پارازیتی
(stray) هستند که در درون یک سیستم سیرکوله می شوند. جریانهای سیگما به
عنوان یک نتیجه از فرکانس سیگنال، سطح ولتاژ، ظرفیت خازنی و اندوکتانس در
هادی ها تولید می شوند. این جریانهای گردان می توانند مسیر عبور خود را از
طریق سیستمهای حفاظت زمین ببندند که باعث تریپ شدن سیستم بر اثر نویز یا در
برخی مواقع باعث افزایش دما در سیم پیچها گردند. جریان سیگما را می توان
در کابل کشی موتور یافت و عبارت است از مجموع جریانهای سه فاز در هر نقطه
در زمان است. در یک وضعیت درست، مجموع جریانهای سه فاز مساوی با صفر خواهد
بود. به عبارت دیگر، جریان برگشتی از درایو مساوی جریان وارد شده به آن
است. جریان سیگما را همچنین می توان سیگنال نامتقارنی فهمید که چندین هادی
که به صورت خازنی جریانشان به هادی زمین کوپل شده است.
خرابی مرتبط : قطع مدار به صورت مرموز و مبهم بعلت عبور جریان حفاظتی
زمین. تجهیزات برای اندازه گیری و تشخیص: Fluke 190-204 ScopeMeter
اسیلوسکوپ 4 کانال قابل حمل با پهنای باند عریض (10kHz) کلمپ جریان (Fluke
i400S یا مشابه آن( میزان بحرانی بودن : کم
6 – اضافه بارهای عملیاتی

اضافه بار موتور هنگامی رخ می دهد که
موتور تحت باری بیش از مقدار بار نامی خود باشد. اولین نشانه ای که با
اضافه بار بروز می کند کشیدن جریان بیش از حد موتور ، گشتاور ناکافی و داغ
شدن زیاد آن است. حرارت بیش از حد موتور علت اصلی خرابی موتور است. در
حالتی که موتور اضافه بار گذاری شده است تک تک اجزای موتور شامل یاتاقانها،
سیم پیچ های موتور و بقیه اجزا ممکن است به خوبی کار کنند اما موتور به
داغ شدن خود ادامه خواهد داد. به همین دلیل، فکر خوبی است که عیب یابی خود
را از تحقیق در مورد اضافه بار موتور شروع کنیم. چونکه 30 درصد از خرابی
های موتور به دلیل اضافه بار آن است.از اینرو چگونگی تشخیص و اندازه گیری
اضافه بار موتور مهم است.
خرابی مرتبط : فرسودگی زود هنگام اجزای الکتریکی و مکانیکی که منجر به
خرابی دائمی می شود. تجهیزات برای اندازه گیری و تشخیص: دوربین مادون قرمز
Fluke Ti400 ، مولتی متر دیجیتال Fluke 289 میزان بحرانی بودن : زیاد
عوامل مکانیکی
7- ناهم محوری

ناهم محوری هنگامی رخ می دهد که شفت دوار
موتور در راستای بار قرار نداشته باشد. یا عضوی که موتور را به بار کوپل می
کند همراستا نباشند. بسیاری از حرفه ای ها معتقد هستند که کوپلینگهای
انعطاف پذیر ناهم محوری را جبران و حذف می کنند. اما یک کوپلینگ انعطاف
پذیر تنها کوپلینگ را از ناهم محوری محافظت می کند. حتی با یک کوپلینگ
انعطاف پذیر نیز نیروهای گردشی خسارت آور همراه را در امتداد شفت انتقال
داده و به موتور می رساند. که منجر به فرسایش موتور و افزایش یافتن بار
ظاهری می گردد. علاوه بر این، نا هم محوری ممکن است باعث لرزش شفت موتور و
بار دوار گردد. چند نوع نا هم محوری داریم که شامل:
- نا هم محوری زاویه ای: مراکز دو شفت روبروی هم هستند اما در موازات یکدیگر قرار ندارند.
- ناهم محور موازی: مراکز دو شفت در موازات هم هستند اما با یکدیگر هم مرکز نیستند.
- نا هم محوری ترکیبی: ترکیبی از ناهم محوری زاویه ای و موازی است.
(توجه: تقریبا همه ناهم محوری ها از نوع مرکب هستند. اما متخصصان ابراز می
کنند که جداسازی و صحبت کردن از دو ناهم محوری باعث می شود آدرس دادن در
مورد آنها و اصلاح ناهم محوری آسان تر گردد)
خرابی مرتبط : فرسودگی زودرس اجزای دوار مکانیکی که منجر به خرابی دائمی
می گردد. تجهیزات برای اندازه گیری و تشخیص: Fluke 810 تستر لرزش برای
شناسایی موضوع ناهم محوری، Fluke 830 ابزار هم محور کردن لیزری شفت برای
تشخیص و تصحیح ناهم محوری. میزان بحرانی بودن: زیاد
8 – عدم تعادل شفت

عدم تعادل شرایطی است که که در آنجا مرکز
جرم جزئ گردان بر روی محور دوران قرار ندارد. به عبارت دیگر، یک نقطه سنگین
"heavy spot" در جایی بر روی روتور است. اگر چه شما هرگز بصورت کامل نمی
توانید عدم تعادل موتور را حذف کنید، می توانید شناسایی و تشخیص دهید که در
چه زمانی در خارج از محدوده عادی خود قرار دارد و برای اصلاح آن چه اقدامی
را می توانید انجام دهید. عدم تعادل می تواند توسط عوامل مختلفی ایجاد شود
از قبیل:
- انباشتگی آلودگی
- از دست رفتن وزنه های تعادل
- تغییرات صنعتی
- جسم ناخواسته در سیم پیچهای موتور و بقیه عوامل فرساینده مرتبط
یک تستر لرزش یا آنالایزر می توانند به شما در تشخیص بالانس بودن و یا
عدم تعادل ماشین گردان کمک کنند. خرابی مرتبط : فرسودگی زودرس در اجزای
مکانیکی دوار که منجر به خرابی دایمی می گردد. تجهیزات برای اندازه گیری و
تشخیص: تستر لرزش Fluke 810 میزان بحرانی بودن: زیاد
9 - شل و آزاد بودن شفت (Shaft looseness)

شل و آزاد بودن وقتی رخ می دهد که فضای آزاد در بین قطعات وجود داشته باشد. شلی می تواند در محلهای مختلفی رخ دهد از قبیل:
- شلی و آزادی گردان: به دلیل وجود فضای باز بین اجزای دوار و اجزای ثابت ماشین رخ می دهد، مانند یاتاقان
- شلی و آزادی غیر گردان: بین دو بخش که در حالت معمولی ساکن هستند رخ می
دهد، مانند پایه و یک فونداسیون، یک محفظه بلبرینگ و یک ماشین.
همانند باقی منابع ایجاد لرزش، این مهم
است که بدانیم چگونه شل شدگی را تشخیص داده و مشکل را حل کنیم تا از دست
رفتن سرمایه و منابع جلوگیری کنیم. یک دستگاه آزمونگر لرزش یا آنالایزر می
توانند معین کنند که یک ماشین گردان مبتلا به مشکل شل شدگی است یا خیر.
خرابی مرتبط: تسریع در فرسودگی اجزای گردان که در ادامه باعث خرابی
ماشین می گردد. تجهیزات برای اندازه گیری و تشخیص: تستر لرزش Fluke 810
میزان بحرانی بودن: زیاد
10- فرسودگی یاتاقان

یک یاتاقان خراب شده اصطکاک را افزایش
داده، حرارت بیشتری تولید می کند و به علت مشکلات مکانیکی، روانکاری یا
فرسودگی راندمان پایین تری دارد. خرابی یاتاقانها می تواند توسط دلایل
مختلفی ایجاد گردد مانند:
- باری بیش از بار مجاز بر روی آن قرار گیرد
- روانکاری نامناسب یا ناکافی
- آب بندی ناکارآمد یاتاقان
- نا هم محوری شفت
- انطباق نادرست (Incorrect fit)
- فرسایش معمول
- ولتاژهای القایی شفت
به محض شروع خراب شدن یاتاقان، همچنین یک
تاثیر آبشاری ایجاد می کند که خراب شدن موتور را شتاب می دهد. 13% از خرابی
های موتور بدلیل خرابی یاتاقانها ایجاد می گردد. و بیش از 60% خرابی های
مکانیکی در تاسیسات بدلیل فرسودگی یاتاقانها است. و از اینرو یادگیری اینکه
چگونه این پتانسیل ایجاد مشکل را رفع عیب کنیم مهم است.
خرابی مرتبط: تسریع فرسودگی در اجزای گردان که منتج به خرابی یاتاقان می
شود. تجهیزات برای اندازه گیری و تشخیص: تستر لرزش Fluke 810 میزان بحرانی
بودن: زیاد
عوامل نصب نادرست
11 - پایه (سطح اتکای) ضعیف

پایه ضعیف اشاره به شرایطی دارد که در آن
پایه نصب یک موتور یا جز گردان صاف و هموار نیستند و یا سطحی که پایه بر
روی آن نصب می شود و می نشیند هموار نیست. این شرایط می تواند باعث ایجاد
فشردگی بر روی بلتهای نصب کننده پایه گردیده و ایجاد کشیدگی بیشتر و یا
ناهم محوری گردد. پایه ضعیف اغلب بین دو پیچی که به صورت مورب نصب شده اند
ایجاد می گردد. مشابه با مسیری که یک صندلی ناهموار تمایل دارد به صورت
قطری بلغزد. دو نوع پایه (سطح اتکا) ضعیف وجود دارد.
- پایه ضعیف موازی – پایه ضعیف موازی هنگامی رخ می دهد که یکی از پایه ها در محل نصب بالاتر از سه پایه دیگر باشد.
- پایه ضعیف زاویه ای – پایه ضعیف زاویه ای وقتی رخ می دهد که یکی از پایه های نصب شده با سطح استقرار موازی یا "نرمال" نیست.
در هر دو حالت، پایه ضعیف می تواند بوسیله
یک بی قاعدگی در پایه نصب ماشین ، یا در فونداسیون در جایی که نشیمنگاه
پایه در آنجا قرار می گیرد. رخ دهد. در هر دو حالت، قبل از اینکه همراستا
یی شفت را تنظیم و برقرار کنیم هر یک از وضعیتهای پایه ضعیف باید کشف
گردیده و اصلاح گردد. یک ابزار تنظیم لیزری خوب می تواند وجود مشکل پایه
ضعیف را در یک ماشین گردان و وجود یا عدم وجود این مشکل را تشخیص دهد.
خرابی مرتبط: نا هم محوری اجزای دوار مکانیکی تجهیزات برای اندازه گیری و
تشخیص: ابزار تنظیم لیزری شفت Fluke 830 میزان بحرانی بودن: متوسط
12- کشیدگی و کرنش لوله

کشیدگی و کرنش (لوله) به شرایطی گفته می
شود که تنشهای جدید، کشیدگی ها و نیروهایی بر روی بقیه تجهیزات عمل کرده و
بازگشت آن از تاسیسات به موتور و درایو برگشته و شرایط ناهم محوری ایجاد می
کند. رایج ترین مثال برای این مورد ترکیب های موتور/پمپ می باشد در جاییکه
عوامل مختلفی باعث اعمال نیرو به لوله کشی می گردد عواملی مانند:
- یک جابجایی در فونداسیون
- یک شیر که جدیدا نصب شده یا بقیه اجزا
- برخورد یک شی، خمیدگی یا خیلی ساده فشار وارد شدن بر روی یک لوله
آن نیروها می توانند نیروی متقابل یا
زاویه ای بر روی پمپ وارد کنند، که به نوبه خود باعث می شود شفت موتور/پمپ
نا هم محور گردد. به همین دلیل مهم است که هم ترازی ماشین علاوه بر زمان
نصب شدن به صورت دوره ای مجددا بررسی گردد. – هم ترازی دقیق شرایط موقت
بوده و می تواند به مرور زمان به هم بخورد.
خرابی مرتبط : نا هم محوری و تنش های متعاقب آن بر روی اجزای دوار، منجر به خرابی پیش از موعد می گردد.
تجهیزات برای اندازه گیری و تشخیص: ابزار تنظیم لیزری شفت Fluke 830
میزان بحرانی بودن: کم
13 - ولتاژ شفت

هنگامی که ولتاژهای شفت موتور از توانایی
عایقی گریس یاتاقان افزایش پیدا کنند، جریانهای تخلیه الکتریکی به بلبرینگ
برقرار می گردد. که در نتیجه آن باعث ایجاد چاله و ناصافی در قاب یاتاقان
می گردد اولین نشانه بروز این مشکل سروصدا و داغ شدن بیش از حد یاتاقان
خواهد بود به گونه ای که یاتاقان شروع به از دست دادن شکل ابتدایی خود کرده
و خرده های فلز با گریس مخلوط شده و اصطکاک یاتاقان را افزایش می دهد. این
مساله می تواند منجر به تخریب یاتاقان طی چند ماه و از کار افتادن موتور
گردد. خرابی یاتاقان یک مشکل پرهزینه است که هم در تعمیر موتور و هم مدت از
کار افتادگی موتور را باید مد نظر قرار داد، ار اینرو برای کمک به جلوگیری
از آن، اندازه گیری ولتاژ شفت و جریان یاتاقان یک اقدام و مرحله تشخیصی
مهم است. ولتاژ شفت فقط در هنگامی ایجاد می شود که موتور برقدار بوده و در
حال چرخش باشد.
خرابی مرتبط : جرقه زدن در میان یاتاقان ایجاد حفره و شیار کرده که منجر به افزایش لرزش و در نهایت خرابی یاتاقان می گردد.
تجهیزات برای اندازه گیری و تشخیص:
اسیلوسکوپ 4 کاناله ایزوله قابل حمل Fluke-190-204 Scopemeter همراه با
پروب زغال کربنی ولتاژ شفت AEIGS
چهار استراتژی برای موفقیت
سیستمهای کنترل موتور در سراسر کارخانه
های تولیدی در فرآیندهای بحرانی و حیاتی مورد استفاده قرار می گیرند. خرابی
تجهیزات می تواند باعث از دست رفتن زیاد پول و سرمایه به دلیل خراب شدن
موتور، یا بخشهای دیگر، جایگزینی و مدت از کار افتادگی تجهیزات برای
سیستمهای توان دارای موتور الکتریکی گردد.
با تجهیز مهندسین تعمیر و نگهداری و
تکنسین ها با اطلاعات درست، اولویت بندی حجم کار و مدیریت تعمیر و نگهداری
پیشگیرانه برای پایش تجهیزات و رفع عیب متناوب، می توان از بروز مشکلات
غافلگیر کننده و برخی خرابی ها اجتناب کرد تا سیستم در شرایط تنشهای نرمال
خود کار کرده و بدین طریق هزینه های مدت از کار افتادگی کل را کاهش داد.
چهار استراتژی کلیدی وجود دارد که شما می توانید با انجام آنها سیستم را
بازیابی کرده یا از خرابی زودرس در موتورهای محرک و اجزائ گردان جلوگیری
کنید.
1- دامنه تلرانس عملکرد، مشخصات ماشین و شرایط کارکردی آن را مستند کنید.
2- وقایع و اندازه گیری های شرایط بحرانی را برای قبل و بعد از انجام تعمیرات و نگهداری و در شرایط عادی دریافت کرده و مستند کنید.
3- یک آرشیو مرجع از اندازه گیری ها برای آسان کردن تحلیل روند و تعیین و تشخیص تغییر وضعیت شرایط ایجاد کنید
4- تک تک اندازه گیری ها را ترسم کرده
منحنی تغییرات را ایجاد کنید. هر تغییری در خط روند بیشتر از 10% تا 20%
(یا هر درصدی که شما بر اساس شرایط کاری یا بحرانی بودن سیستم در نظر
بگیرید) بایستی برای ریشه یابی و شناخت دلایل ایجاد آن بررسی گردد.
جهت دریافت فیلم آموزشی فارسی طراحی موتور الکتریکی کلیک کنید

بسته آموزشی فارسی آشنایی با موتور الکتریکی
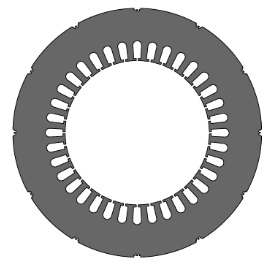
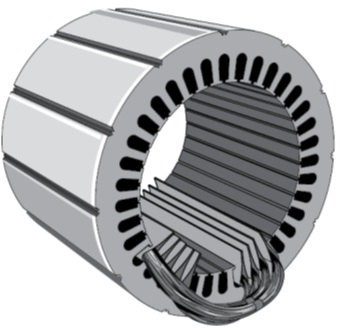
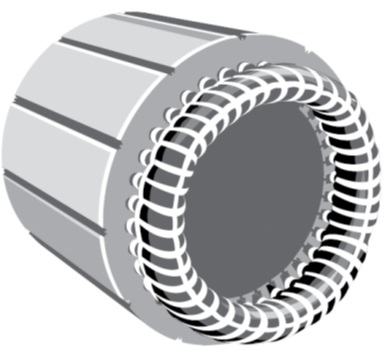
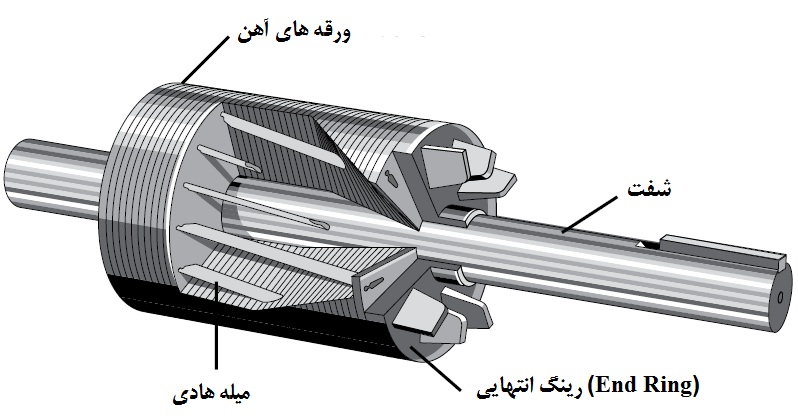
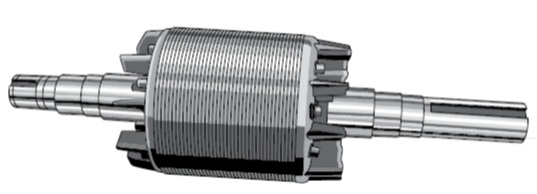 هسته روتور قفس سنجابی بوسیله تجمیع کردن ورقه های نازک آهن ایجاد شده و تشکیل یک سیلندر فلزی را می دهد.
هسته روتور قفس سنجابی بوسیله تجمیع کردن ورقه های نازک آهن ایجاد شده و تشکیل یک سیلندر فلزی را می دهد.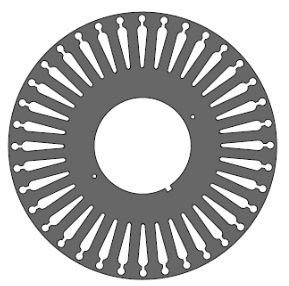
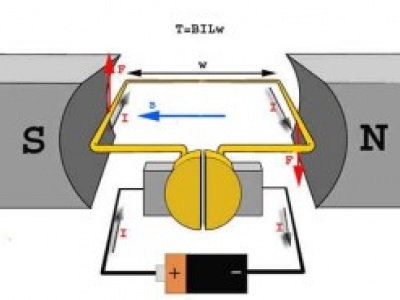
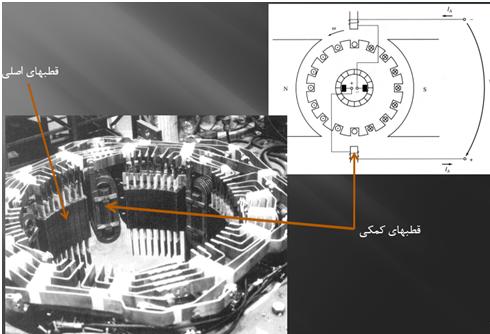
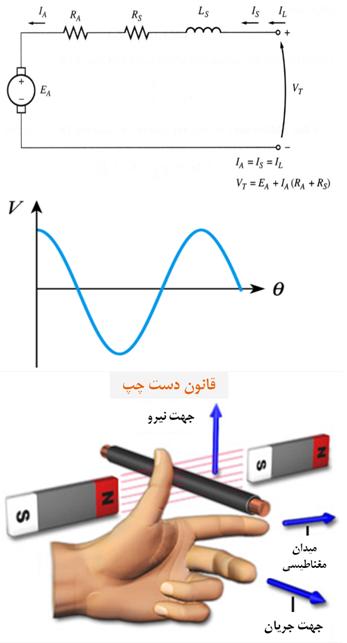
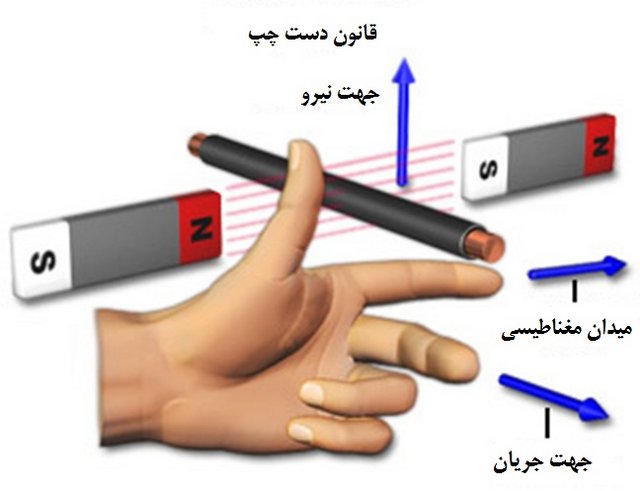 قانون
دست چپ: اگر انگشت اشاره در جهت میدان مغناطیسی قرار بگیرد و انگشت بزرگ
در جهت عبور جریان باشد آنگاه طبق شکل روبرو انگشت شست جهت نیرو را نشان می
دهد. برای تغییر جهت دوران بایستی جهت نیرو را عکس کنیم دو راه به ذهن می
رسد. جهت میدان و یا جهت جریان را تغییر دهیم. ۱- تغییر جهت جریان آرمیچر:
در صورتی که موتور تحریک مستقل یا مغناطیس دائم باشد از طریق تغییر پلاریته
ولتاژ تغذیه این کار صورت می گیرد. ۲- تغییر جهت جریان میدان : که از طریق
تغییر پلاریته ولتاژ میدان این کار انجام می شود. پدیده کموتاسیون
قانون
دست چپ: اگر انگشت اشاره در جهت میدان مغناطیسی قرار بگیرد و انگشت بزرگ
در جهت عبور جریان باشد آنگاه طبق شکل روبرو انگشت شست جهت نیرو را نشان می
دهد. برای تغییر جهت دوران بایستی جهت نیرو را عکس کنیم دو راه به ذهن می
رسد. جهت میدان و یا جهت جریان را تغییر دهیم. ۱- تغییر جهت جریان آرمیچر:
در صورتی که موتور تحریک مستقل یا مغناطیس دائم باشد از طریق تغییر پلاریته
ولتاژ تغذیه این کار صورت می گیرد. ۲- تغییر جهت جریان میدان : که از طریق
تغییر پلاریته ولتاژ میدان این کار انجام می شود. پدیده کموتاسیون  کموتاسیون
فرآیند تبدیل ولتاژ و جریانهای AC ماشین در روتور به ولتاژ و جریان DC در
ترمینال است. کموتاسیون باعث یکسو کردن ولتاژ خروجی در ژنراتورها و یکسو
کردن گشتاور در موتورها می شود. مشکلات مرتبط با پدیده کموتاسیون
برای درک بهتر این مشکلات بایستی عوامل ایجاد مشکل را شناسایی کرد. عکس
العمل عرضی آرمیچر یکی از این عوامل می باشد. در ادامه در مورد این موضوع
بحث خواهد شد.
کموتاسیون
فرآیند تبدیل ولتاژ و جریانهای AC ماشین در روتور به ولتاژ و جریان DC در
ترمینال است. کموتاسیون باعث یکسو کردن ولتاژ خروجی در ژنراتورها و یکسو
کردن گشتاور در موتورها می شود. مشکلات مرتبط با پدیده کموتاسیون
برای درک بهتر این مشکلات بایستی عوامل ایجاد مشکل را شناسایی کرد. عکس
العمل عرضی آرمیچر یکی از این عوامل می باشد. در ادامه در مورد این موضوع
بحث خواهد شد. 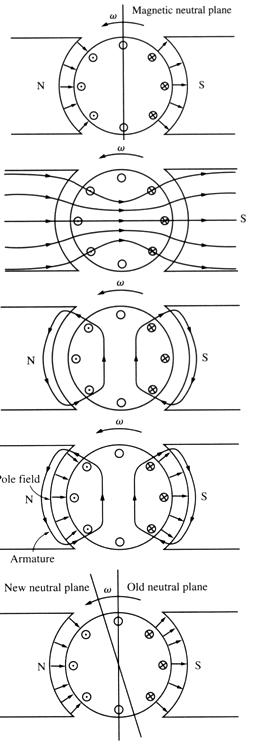 یک ماشین دو قطب را در نظر بگیرید. در ابتدا شار قطب بطور یکنواخت تورزیع
شده است و صفحه خنثی عمود است تاثیر فاصله هوایی بر شار قطب
هنگامی که بار وصل میشود جریانی از داخل روتور عبور کرده و میدان مغناطیسی
را اطراف سیم پیچهای روتور ایجاد می کند. میدان مغناطیسی ایجاد شده
در روتور بر میدان مغناطیسی اصلی قطبها اثر می گذارد. در برخی نقاط با
میدان اصلی جمع شده و در برخی نقاط دیگر از آن کسر می گردد. بنابراین،
میدان مغناطیسی خالص یکنواخت نخواهد بود و صفحه خنثی جابجا خواهد شد.
بطور کلی، صفحه خنثی در ژنراتورها در جهت حرکت و در موتورها در خلاف جهت
حرکت جابجا می شود. مقدار جابجایی به مقدار بار ماشین بستگی دارد.
یک ماشین دو قطب را در نظر بگیرید. در ابتدا شار قطب بطور یکنواخت تورزیع
شده است و صفحه خنثی عمود است تاثیر فاصله هوایی بر شار قطب
هنگامی که بار وصل میشود جریانی از داخل روتور عبور کرده و میدان مغناطیسی
را اطراف سیم پیچهای روتور ایجاد می کند. میدان مغناطیسی ایجاد شده
در روتور بر میدان مغناطیسی اصلی قطبها اثر می گذارد. در برخی نقاط با
میدان اصلی جمع شده و در برخی نقاط دیگر از آن کسر می گردد. بنابراین،
میدان مغناطیسی خالص یکنواخت نخواهد بود و صفحه خنثی جابجا خواهد شد.
بطور کلی، صفحه خنثی در ژنراتورها در جهت حرکت و در موتورها در خلاف جهت
حرکت جابجا می شود. مقدار جابجایی به مقدار بار ماشین بستگی دارد.
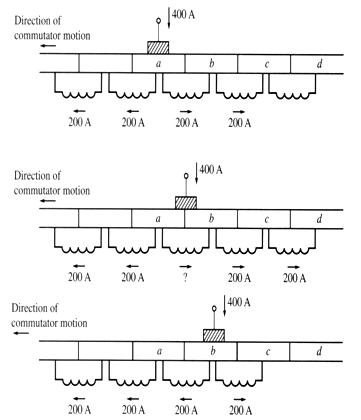 فرض کنیم جریان در جاروبک ۴۰۰ آمپر است. جریان در هر مسیر ۲۰۰ می شود با
عبور تیغه کموتاتور از جلوی جاروبک جریان گذرنده از تیغه کموتاتور بایستی
معکوس گردد. فرض کنیم که ماشین با سرعت ۸۰۰ rpm می گردد و دارای ۵۰ تیغه
کموتاتور است. ورود به ناحیه زیر جاروبک و عبور از آن ۰٫۰۱۵ ثانیه طول می
کشد. متوسط نرخ تغییرات جریان در حلقه اتصال کوتاه شده به صورت زیر می
گردد.
فرض کنیم جریان در جاروبک ۴۰۰ آمپر است. جریان در هر مسیر ۲۰۰ می شود با
عبور تیغه کموتاتور از جلوی جاروبک جریان گذرنده از تیغه کموتاتور بایستی
معکوس گردد. فرض کنیم که ماشین با سرعت ۸۰۰ rpm می گردد و دارای ۵۰ تیغه
کموتاتور است. ورود به ناحیه زیر جاروبک و عبور از آن ۰٫۰۱۵ ثانیه طول می
کشد. متوسط نرخ تغییرات جریان در حلقه اتصال کوتاه شده به صورت زیر می
گردد. 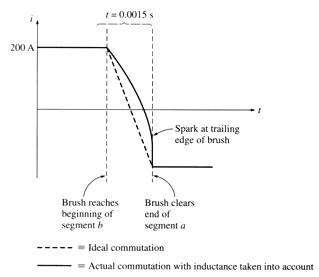
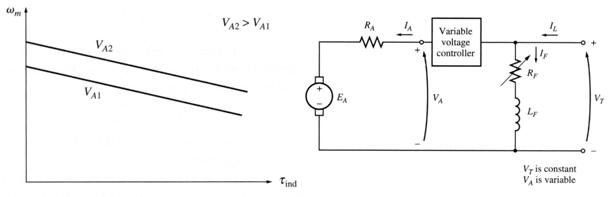
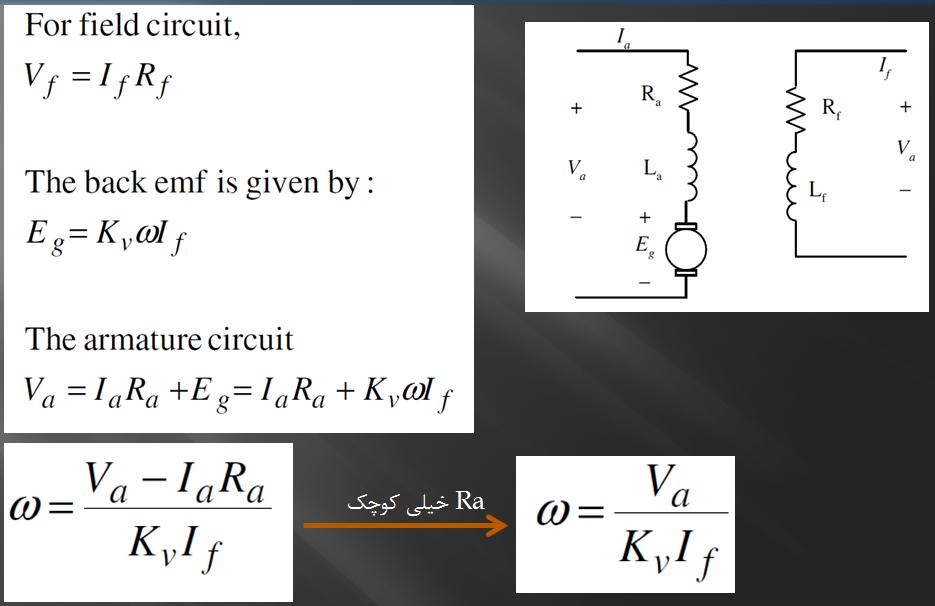 از رابطه بدست آمده برای سرعت ω می توان به این نتیجه رسید که برای کنترل
سرعت موتور Dc دو راه وجود دارد یا باید ولتاژ ترمینال Va را کنترل کرد و
یا جریان تحریک If از اینرو دو روش کلی برای کنترل سرعت موتورهای DC وجود
دارد.
از رابطه بدست آمده برای سرعت ω می توان به این نتیجه رسید که برای کنترل
سرعت موتور Dc دو راه وجود دارد یا باید ولتاژ ترمینال Va را کنترل کرد و
یا جریان تحریک If از اینرو دو روش کلی برای کنترل سرعت موتورهای DC وجود
دارد.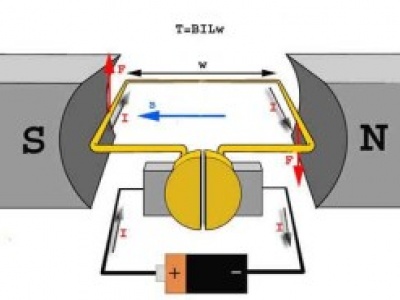
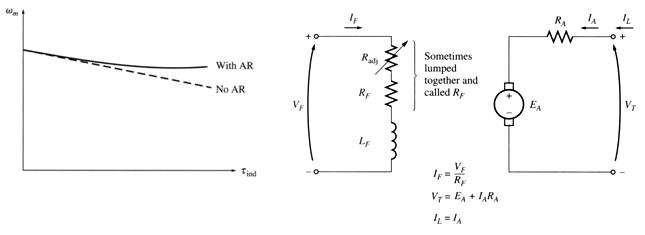
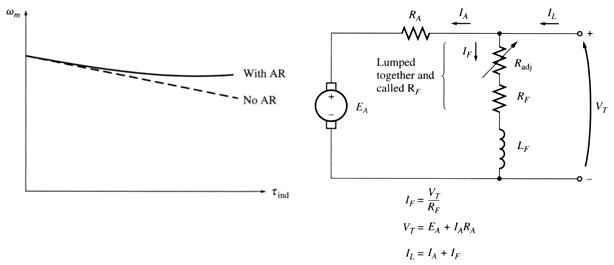 با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و
موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از اینرو در دسته بندی
موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در
خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت
دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری
شبیه به موتورهای القایی از خود نشان می دهند.
با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و
موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از اینرو در دسته بندی
موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در
خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت
دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری
شبیه به موتورهای القایی از خود نشان می دهند. 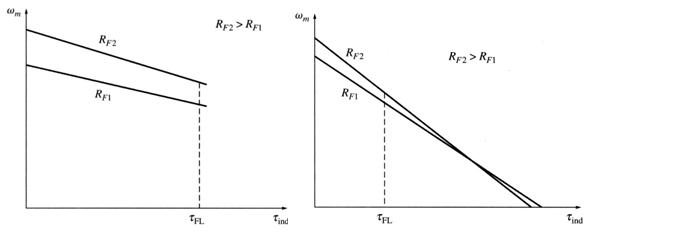
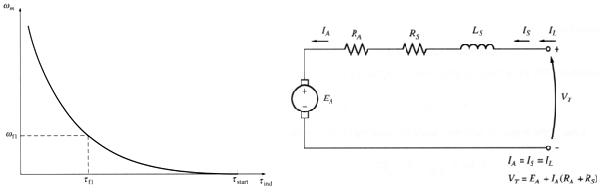 با توجه به منحنی خارجی موتور سری مشخص است که این موتور در بارهای کم
سرعت زیادی دارد و در سرعت کم یا لحظه راه اندازی گشتاور قابل توجهی تولید
می کند و مناسب بارهایی است که گشتاور راه اندازی و کار زیادی نیاز دارند
مانند بالابرها آسانسورها و کانوایرها اما هرگز نباید بی بار کار کند.
چونکه در این صورت به سرعت خطرناک می رسد.
با توجه به منحنی خارجی موتور سری مشخص است که این موتور در بارهای کم
سرعت زیادی دارد و در سرعت کم یا لحظه راه اندازی گشتاور قابل توجهی تولید
می کند و مناسب بارهایی است که گشتاور راه اندازی و کار زیادی نیاز دارند
مانند بالابرها آسانسورها و کانوایرها اما هرگز نباید بی بار کار کند.
چونکه در این صورت به سرعت خطرناک می رسد.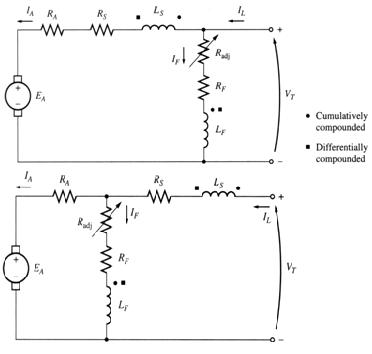 موتور کمپوند با اتصال شنت بلند موتور کمپوند با اتصال شنت کوتاه
موتور کمپوند با اتصال شنت بلند موتور کمپوند با اتصال شنت کوتاه 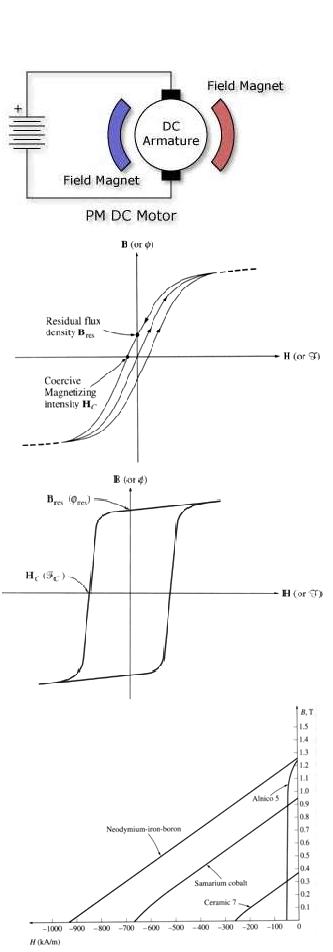
 توجیه رفتار و عملکرد موتور اونیورسال
در قسمتهای قبلی همین مقاله توضیح دادیم که موتور DC با ولتاژ مستقیم کار
می کند. حال اجازه دهید همین موتور DC تحریک سری را که شماتیک آن در روبرو
آورده شده است به یک منبع ولتاژ AC متصل کنیم چه اتفاقی می افتد. انتظار
دارید نچرخد؟ منبع ولتاژ متناوب باعث معکوس شدن جریان در هر نیم سیکل در
سیم پیچی موتور می گردد. حال بیایید به قانون دست چپ الکتروموتور DC مجددا
نگاهی بیاندازیم. قبلا توضیح دادیم که طبق این قانون هنگامی جهت گردش موتور
تغییر می کند که جهت میدان مغناطیسی یا جریان گذرنده از آرمیچر تغییر کند.
در موتور سری هر دوی اینها با هم سری هستند و تعویض پلاریته که در کار با
ولتاژ متناوب در هر نیم سیکل رخ می دهد باعث تغییر جهت هر دو می شود و از
اینرو جهت دوران ثابت باقی می ماند و موتور می تواند در یک جهت گشتاور
تولید کرده و به دوران خود ادامه دهد. خیلی ساده به نظر می رسد. جهت کار در
ولتاز AC بهینه سازی هایی نظیر ورقه ورقه کردن هسته و … انجام شده است که
موتور را برای کار در هر دو نوع ولتاژ بهینه کرده است.
توجیه رفتار و عملکرد موتور اونیورسال
در قسمتهای قبلی همین مقاله توضیح دادیم که موتور DC با ولتاژ مستقیم کار
می کند. حال اجازه دهید همین موتور DC تحریک سری را که شماتیک آن در روبرو
آورده شده است به یک منبع ولتاژ AC متصل کنیم چه اتفاقی می افتد. انتظار
دارید نچرخد؟ منبع ولتاژ متناوب باعث معکوس شدن جریان در هر نیم سیکل در
سیم پیچی موتور می گردد. حال بیایید به قانون دست چپ الکتروموتور DC مجددا
نگاهی بیاندازیم. قبلا توضیح دادیم که طبق این قانون هنگامی جهت گردش موتور
تغییر می کند که جهت میدان مغناطیسی یا جریان گذرنده از آرمیچر تغییر کند.
در موتور سری هر دوی اینها با هم سری هستند و تعویض پلاریته که در کار با
ولتاژ متناوب در هر نیم سیکل رخ می دهد باعث تغییر جهت هر دو می شود و از
اینرو جهت دوران ثابت باقی می ماند و موتور می تواند در یک جهت گشتاور
تولید کرده و به دوران خود ادامه دهد. خیلی ساده به نظر می رسد. جهت کار در
ولتاز AC بهینه سازی هایی نظیر ورقه ورقه کردن هسته و … انجام شده است که
موتور را برای کار در هر دو نوع ولتاژ بهینه کرده است.





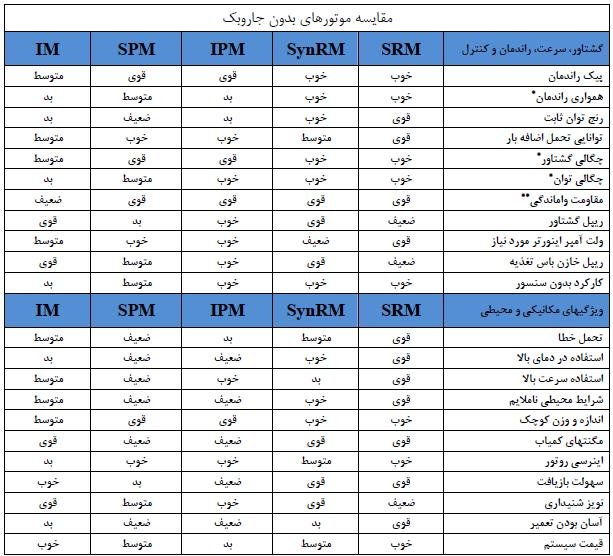
 مهندسین هنگامی که تصمیم به استفاده از موتور بدون جاروبک می گیرند
انتخاب های متعددی برای طراحی خود دارند. انتخاب اشتباه می تواند فرجام یک
طراحی را از یک طرح خوب به یک طرح متوسط تبدیل کرده و باعث شکست در بازار
فروش گردد. از اینرو تیم طراحی و مهندسی جهت اطمینان از انتخاب درست موتور
بدون جاروبک در پروژه خود می توانند از مطالب گرد آمده در این مقاله
استفاده کنند.
مهندسین هنگامی که تصمیم به استفاده از موتور بدون جاروبک می گیرند
انتخاب های متعددی برای طراحی خود دارند. انتخاب اشتباه می تواند فرجام یک
طراحی را از یک طرح خوب به یک طرح متوسط تبدیل کرده و باعث شکست در بازار
فروش گردد. از اینرو تیم طراحی و مهندسی جهت اطمینان از انتخاب درست موتور
بدون جاروبک در پروژه خود می توانند از مطالب گرد آمده در این مقاله
استفاده کنند.