موتورهای DC ساختمانی پیچیده و مدل ریاضی ساده تری برای کنترل سرعت دارند. در این مقاله ساختمان، عملکرد و کاربردهای آن تشریح شده است
موتورهای DC ساختمانی پیچیده و مدل ریاضی ساده تری برای کنترل سرعت دارند. در این مقاله ساختمان، عملکرد و کاربردهای آن تشریح شده است
در
قسمت اول این نوشته در مورد ساختمان موتورهای DC ، اصول کار، روابط نیرو و
گشتاور، حفاظت و راه اندازی این موتورها صحبت کردیم در این پست ادامه
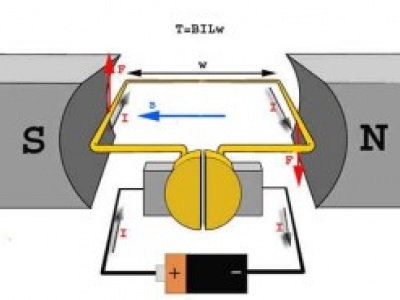
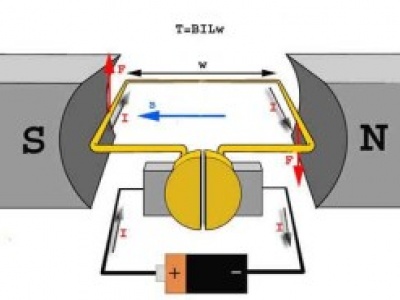
مطالب را ارائه خواهیم کرد. تغییر جهت دوران در موتورهای DC برای فهم بهتر این موضوع بهتر است که از قانون دست چپ برای موتورهای DC استفاده کنیم. به شکل زیر توجه کنید. 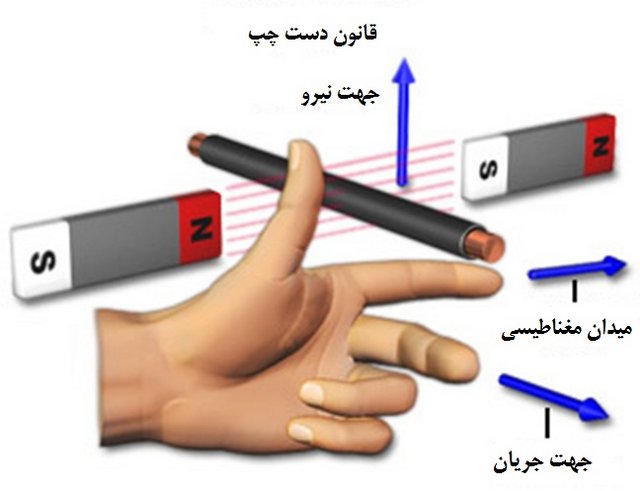 قانون
دست چپ: اگر انگشت اشاره در جهت میدان مغناطیسی قرار بگیرد و انگشت بزرگ
در جهت عبور جریان باشد آنگاه طبق شکل روبرو انگشت شست جهت نیرو را نشان می
دهد. برای تغییر جهت دوران بایستی جهت نیرو را عکس کنیم دو راه به ذهن می
رسد. جهت میدان و یا جهت جریان را تغییر دهیم. ۱- تغییر جهت جریان آرمیچر:
در صورتی که موتور تحریک مستقل یا مغناطیس دائم باشد از طریق تغییر پلاریته
ولتاژ تغذیه این کار صورت می گیرد. ۲- تغییر جهت جریان میدان : که از طریق
تغییر پلاریته ولتاژ میدان این کار انجام می شود. پدیده کموتاسیون
قانون
دست چپ: اگر انگشت اشاره در جهت میدان مغناطیسی قرار بگیرد و انگشت بزرگ
در جهت عبور جریان باشد آنگاه طبق شکل روبرو انگشت شست جهت نیرو را نشان می
دهد. برای تغییر جهت دوران بایستی جهت نیرو را عکس کنیم دو راه به ذهن می
رسد. جهت میدان و یا جهت جریان را تغییر دهیم. ۱- تغییر جهت جریان آرمیچر:
در صورتی که موتور تحریک مستقل یا مغناطیس دائم باشد از طریق تغییر پلاریته
ولتاژ تغذیه این کار صورت می گیرد. ۲- تغییر جهت جریان میدان : که از طریق
تغییر پلاریته ولتاژ میدان این کار انجام می شود. پدیده کموتاسیون  کموتاسیون
فرآیند تبدیل ولتاژ و جریانهای AC ماشین در روتور به ولتاژ و جریان DC در
ترمینال است. کموتاسیون باعث یکسو کردن ولتاژ خروجی در ژنراتورها و یکسو
کردن گشتاور در موتورها می شود. مشکلات مرتبط با پدیده کموتاسیون
برای درک بهتر این مشکلات بایستی عوامل ایجاد مشکل را شناسایی کرد. عکس
العمل عرضی آرمیچر یکی از این عوامل می باشد. در ادامه در مورد این موضوع
بحث خواهد شد.
کموتاسیون
فرآیند تبدیل ولتاژ و جریانهای AC ماشین در روتور به ولتاژ و جریان DC در
ترمینال است. کموتاسیون باعث یکسو کردن ولتاژ خروجی در ژنراتورها و یکسو
کردن گشتاور در موتورها می شود. مشکلات مرتبط با پدیده کموتاسیون
برای درک بهتر این مشکلات بایستی عوامل ایجاد مشکل را شناسایی کرد. عکس
العمل عرضی آرمیچر یکی از این عوامل می باشد. در ادامه در مورد این موضوع
بحث خواهد شد. 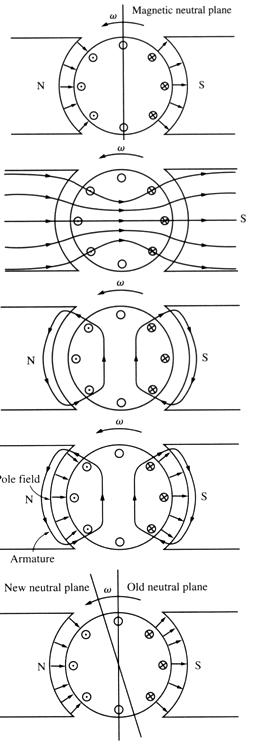 یک ماشین دو قطب را در نظر بگیرید. در ابتدا شار قطب بطور یکنواخت تورزیع
شده است و صفحه خنثی عمود است تاثیر فاصله هوایی بر شار قطب
هنگامی که بار وصل میشود جریانی از داخل روتور عبور کرده و میدان مغناطیسی
را اطراف سیم پیچهای روتور ایجاد می کند. میدان مغناطیسی ایجاد شده
در روتور بر میدان مغناطیسی اصلی قطبها اثر می گذارد. در برخی نقاط با
میدان اصلی جمع شده و در برخی نقاط دیگر از آن کسر می گردد. بنابراین،
میدان مغناطیسی خالص یکنواخت نخواهد بود و صفحه خنثی جابجا خواهد شد.
بطور کلی، صفحه خنثی در ژنراتورها در جهت حرکت و در موتورها در خلاف جهت
حرکت جابجا می شود. مقدار جابجایی به مقدار بار ماشین بستگی دارد.
یک ماشین دو قطب را در نظر بگیرید. در ابتدا شار قطب بطور یکنواخت تورزیع
شده است و صفحه خنثی عمود است تاثیر فاصله هوایی بر شار قطب
هنگامی که بار وصل میشود جریانی از داخل روتور عبور کرده و میدان مغناطیسی
را اطراف سیم پیچهای روتور ایجاد می کند. میدان مغناطیسی ایجاد شده
در روتور بر میدان مغناطیسی اصلی قطبها اثر می گذارد. در برخی نقاط با
میدان اصلی جمع شده و در برخی نقاط دیگر از آن کسر می گردد. بنابراین،
میدان مغناطیسی خالص یکنواخت نخواهد بود و صفحه خنثی جابجا خواهد شد.
بطور کلی، صفحه خنثی در ژنراتورها در جهت حرکت و در موتورها در خلاف جهت
حرکت جابجا می شود. مقدار جابجایی به مقدار بار ماشین بستگی دارد.
مشکلات ایجاد شده توسط پدیده کموتاسیون
۱- ایجاد جرقه و آسیب دیدن جاروبک و کموتاتور
کموتاتور بایستی دقیقا تیغه های کموتاتورهایی که ولتاژ دو سر آنهاصفر
هستند را اتصال کوتاه بکند. جابجایی صفحه خنثی باعث میشود که کموتاتور تیغه
هایی را دو سر آنها ولتاژ وجود دارد را اتصال کوتاه کند که موجب جرقه زنی و
قوس در زیر جاروبکها می شود. 
۲- ایجاد ولتاژهای L di/dt
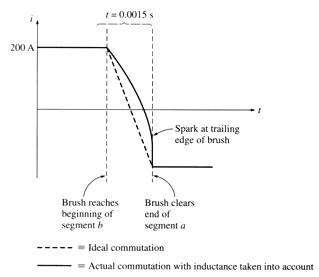
این مساله در قطعات کموتاتور با شروع اتصال کوتاه آنها توسط جاروبکها شروع می شود. و ضربه القایی نامیده می شود. 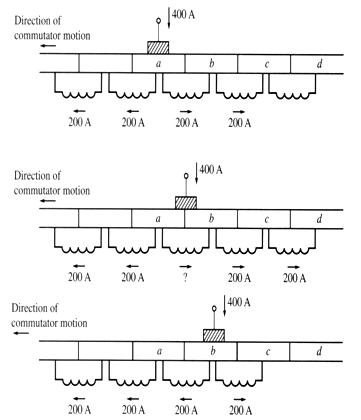 فرض کنیم جریان در جاروبک ۴۰۰ آمپر است. جریان در هر مسیر ۲۰۰ می شود با
عبور تیغه کموتاتور از جلوی جاروبک جریان گذرنده از تیغه کموتاتور بایستی
معکوس گردد. فرض کنیم که ماشین با سرعت ۸۰۰ rpm می گردد و دارای ۵۰ تیغه
کموتاتور است. ورود به ناحیه زیر جاروبک و عبور از آن ۰٫۰۱۵ ثانیه طول می
کشد. متوسط نرخ تغییرات جریان در حلقه اتصال کوتاه شده به صورت زیر می
گردد.
فرض کنیم جریان در جاروبک ۴۰۰ آمپر است. جریان در هر مسیر ۲۰۰ می شود با
عبور تیغه کموتاتور از جلوی جاروبک جریان گذرنده از تیغه کموتاتور بایستی
معکوس گردد. فرض کنیم که ماشین با سرعت ۸۰۰ rpm می گردد و دارای ۵۰ تیغه
کموتاتور است. ورود به ناحیه زیر جاروبک و عبور از آن ۰٫۰۱۵ ثانیه طول می
کشد. متوسط نرخ تغییرات جریان در حلقه اتصال کوتاه شده به صورت زیر می
گردد.
di/dt = 400/0.0015 = 266667 A/s
بنابراین، حتی با یک اندوکتانس کوچک حلقه، یک ضربه بسیار بزرگ ولتاژ القایی L di/dt در تیغه کموتاتور اتصال کوتاه شده القا می گردد این ولتاژ باعث ایجاد جرقه در جاروبکها می شود.
راهکارهای بهبود پدیده کموتاسیون ۱- تغییر محل جاروبکها: به گونه ای که
در محور خنثی قرار بگیرد. ۲- افزودن قطهای کمکی به ماشین DC ۳- استفاده از
سیم پیچهای جبرانگر در ماشین DC ۴- افزایش تعداد تیغه های کلکتور به صورت
مضربی از شیارهای آرمیچر 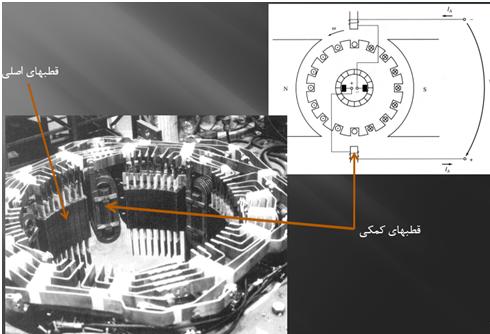
کنترل سرعت موتور موتورDC
مزایا ۱- سهولت در کنترل ۲- ارائه گشتاور راه اندازی بالا ۳- عملکرد تقریبا خطی معایب ۱- نیاز به نگهداری زیاد ۲- بزرگ و پر هزینه ( در مقایسه با موتور القایی) ۳- نامناسب جهت کارکرد در سرعتهای بالا به علت جاروبکها و کموتاتور ۴- نامناسب جهت استفاده در محیطهای قابل انفجار و یا محیطهای خیلی تمیز
روشهای کنترل سرعت موتورهای DC
در شکل زیر مدار معادل یک موتور DC آورده شده است و روابط سرعت با استفاده از روابط اصلی موتور استخراج شده است. 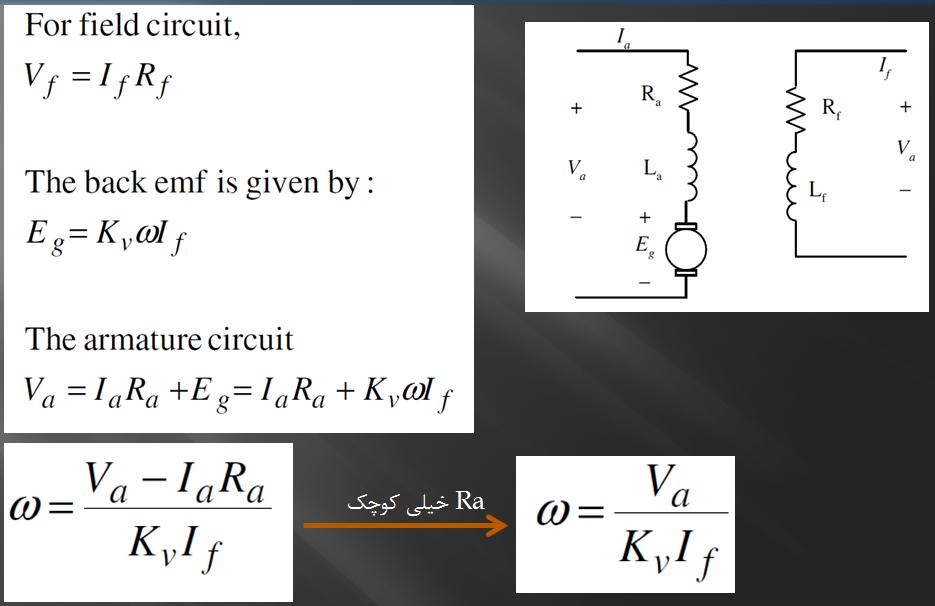 از رابطه بدست آمده برای سرعت ω می توان به این نتیجه رسید که برای کنترل
سرعت موتور Dc دو راه وجود دارد یا باید ولتاژ ترمینال Va را کنترل کرد و
یا جریان تحریک If از اینرو دو روش کلی برای کنترل سرعت موتورهای DC وجود
دارد.
از رابطه بدست آمده برای سرعت ω می توان به این نتیجه رسید که برای کنترل
سرعت موتور Dc دو راه وجود دارد یا باید ولتاژ ترمینال Va را کنترل کرد و
یا جریان تحریک If از اینرو دو روش کلی برای کنترل سرعت موتورهای DC وجود
دارد.
الف: با کنترل ولتاژ ترمینال
در این روش با افزایش و یا کاهش ولتاژ ترمینال می توان به سرعتهای مورد نظر دست یافت. و فقط تا سرعت نامی قابل استفاده است. چرا؟
ب: با کاهش جریان تحریک
در این روش مطابق رابطه فوق جریان تحریک و سرعت با هم رابطه عکس دارند از اینرو با کاهش جریان تحریک می توان سرعت آن را افزایش داد و بالعکس. در هنگام راه اندازی نباید از این روش استفاده کرد. چرا؟
درایو موتورهای DC
نکاتی در مورد درایو موتورهای DC
- درایو موتور DC نسبتا ساده و ارزان قیمت است (در مقایسه با درایوهای موتور القایی). البته خود موتور DC گرانتر است.
- به علت معایب زیاد، موتورهای DC (مخصوصا نگهداری) در حال از دست دادن مقبولیت خود مخصوصا در کاربردهای توان بالا می باشند.
- در کاربردهای توان پایین قیمت موتور DC به اضافه درایو هنوز اقتصادی و به صرفه است.
- برای کاربردهای سروو درایو ، موتورهای DC به علت پاسخ دینامیکی خوب و کنترل مناسب هنوز رایج هستند.
- رویکرد استفاده از موتورهای DC مخصوصا در توانهای بالا چندان روشن و خوش بینانه نیست.
در قسمت اول این نوشته در مورد ساختمان موتورهای DC ، اصول کار، روابط نیرو و گشتاور، حفاظت و راه اندازی این موتورها صحبت کردیم در قسمت دوم درباره تغییر جهت دوران، پدیده کموتاسیون و کنترل سرعت موتورهای DC مطالبی ارائه گردید. قسمت سوم و پایانی این مبحث در این پست ارائه شده است. موتورهای DC انواع مختلفی دارند که از لحاظ کاربرد و مشخصه با همدیگر متفاوت هستند. موتورهای انیورسال با هر دو ولتاژ AC و DC کار می کنند اما ساختار آنها شباهتا بسیار زیادی با موتورهای DC دارد در انتهای این مقاله در مورد این موتورها نیز صحبت خواهیم کرد.
انواع موتورهای DC
موتورهای DC را میتوان به دو دسته کلی تقسیم بندی نمود.
الف: تحریک مستقل
ب: خود تحریک شامل
۱- تحریک شنت ۲- تحریک سری ۳- کمپوند اضافی ۴- کمپوند نقصانی موتورهای مغناطیس دائم را شاید بتوان در رده موتورهای تحریک مستقل قرار داد در این موتورها یک مغناطیس دائمی عمل تحریک را انجام می دهد.
موتور تحریک مستقل
مدار معادل و مشخصه خارجی موتور تحریک مستقل در شکل زیر آورده شده است. 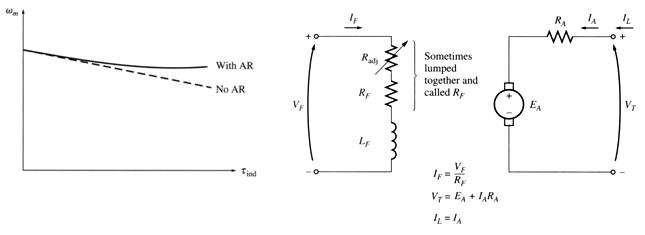 مدار معادل مدل مداری موتور الکتریکی DC بوده و کمک می کند تا با استفاده
از قوانین ساده کیرشهف و قانون اهم مدار و رفتار الکتروموتور را تحلیل کرد.
روابط اصلی در زیر شماتیک نوشته شده است. منحنی مشخصه خارجی موتور DC :
مشخصه تغییرات سرعت بر حسب تغییرات گشتاور است. و بیانگیر این موضوع است که
سرعت الکتروموتور با تغییر (افزایش یا کاهش ) بار روی آن چگونه تغییر می
کند. این مشخصه در تحلیل رفتار ماشین و انتخاب موتور مناسب برای کاربرد
مورد نظر بسیار مهم است.
مدار معادل مدل مداری موتور الکتریکی DC بوده و کمک می کند تا با استفاده
از قوانین ساده کیرشهف و قانون اهم مدار و رفتار الکتروموتور را تحلیل کرد.
روابط اصلی در زیر شماتیک نوشته شده است. منحنی مشخصه خارجی موتور DC :
مشخصه تغییرات سرعت بر حسب تغییرات گشتاور است. و بیانگیر این موضوع است که
سرعت الکتروموتور با تغییر (افزایش یا کاهش ) بار روی آن چگونه تغییر می
کند. این مشخصه در تحلیل رفتار ماشین و انتخاب موتور مناسب برای کاربرد
مورد نظر بسیار مهم است.
موتور خود تحریک شنت
مدار معادل و مشخصه خارجی موتور تحریک مستقل در شکل زیر آورده شده است. 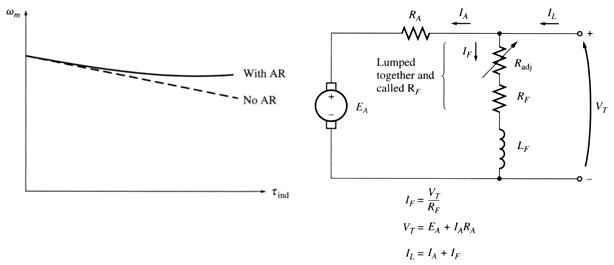 با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و
موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از اینرو در دسته بندی
موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در
خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت
دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری
شبیه به موتورهای القایی از خود نشان می دهند.
با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و
موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از اینرو در دسته بندی
موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در
خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت
دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری
شبیه به موتورهای القایی از خود نشان می دهند.
کنترل سرعت موتور شنت
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان
۱- افزایش مقاومت میدان RF جریان تحریک را کاهش می دهد (IF = VT/RF) ۲- کاهش جریان جریان تحریک IF شار میدان φ را کاهش می دهد. ۳- کاهش شار، ولتاژ نیروی محرکه داخلی تولید شده را کاهش می دهد. (EA = Kφω) ۴- کاهش EA جریان آرمیچر را افزایش می دهد. (IA = (VT – EA)/RA) ۵- تغییرات در جریان آرمیچر بر تغییر شار غالب است از اینرو ، افزایش IA
گشتاور ایجاد شده را افزایش می دهد. ۶- گشتاور ایجاد شده افزایش یافته و
در حال حاضر بزرگتر از گشتاور بار است ، بنابراین ، سرعت ω افزایش می یابد.
۷- افزایش سرعت نیروی محرکه داخلی تولید شده ماشین EA را افزایش می دهد. ۸- افزایش EA جریان آرمیچر IA را کاهش می دهد. ۹- کاهش IA گشتاور تولیدی را کاهش داده به نوعی که در یک سرعت بالاتر Tind = Tload شود.
تاثیر افزایش دادن مقاومت میدان در حدود یک بار نرمال: از بی باری تا بار
کامل افزایش در مقاومت میدان سرعت موتور را افزایش می دهد. مشاهده می شود
که شیب منحنی گشتاور- سرعت با افزایش مقاومت تحریک بیشتر می شود. در یک رنج
وسیعتر منحنی احتمال دارد بصورت زیر درآید. 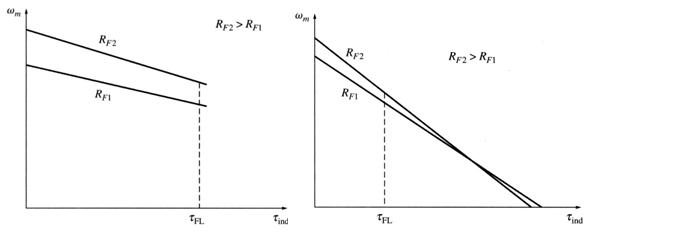
ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
شکل زیر چگونگی کنترل ولتاژ آرمیچر و منحنی های گشتاور سرعت با تغییر
ولتاژ برای این روش آورده شده اند. ملاحظه می شود که در این روش شیب خط
تغییرات سرعت بر اساس گشتاور بار تغییر نمی کند و فقط به سمت بالا و پایین
شیفت پیدا می کند. و از این نظر مطلوب تر از روش قبلی است. 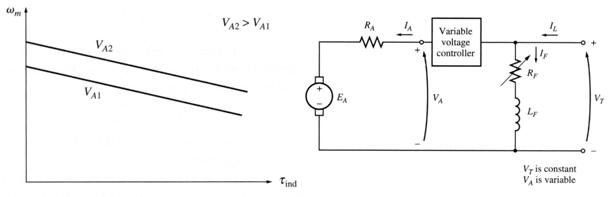
موتور خود تحریک سری
مدار معادل و مشخصه خارجی موتور خودتحریک سری در شکل زیر آورده شده است. 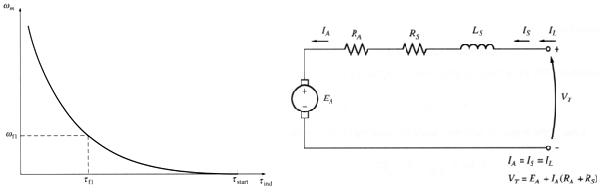 با توجه به منحنی خارجی موتور سری مشخص است که این موتور در بارهای کم
سرعت زیادی دارد و در سرعت کم یا لحظه راه اندازی گشتاور قابل توجهی تولید
می کند و مناسب بارهایی است که گشتاور راه اندازی و کار زیادی نیاز دارند
مانند بالابرها آسانسورها و کانوایرها اما هرگز نباید بی بار کار کند.
چونکه در این صورت به سرعت خطرناک می رسد.
با توجه به منحنی خارجی موتور سری مشخص است که این موتور در بارهای کم
سرعت زیادی دارد و در سرعت کم یا لحظه راه اندازی گشتاور قابل توجهی تولید
می کند و مناسب بارهایی است که گشتاور راه اندازی و کار زیادی نیاز دارند
مانند بالابرها آسانسورها و کانوایرها اما هرگز نباید بی بار کار کند.
چونکه در این صورت به سرعت خطرناک می رسد.
موتور خود تحریک کمپوند
این نوع از موتورها بسته به نحوه اتصال شاخه موازی سیم پیچ تحریک به دو
دسته کمپوند با اتصال شنت بلند و کمپوند با اتصال شنت کوتاه تقسیم می شوند.
مشخصه خارجی این موتورها مابین موتور شنت و سری قرار دارد. 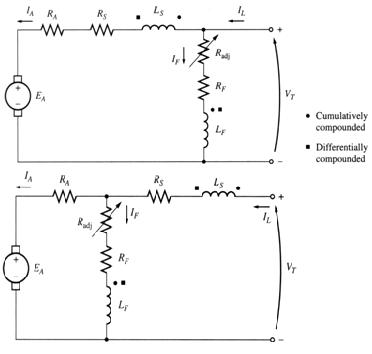 موتور کمپوند با اتصال شنت بلند موتور کمپوند با اتصال شنت کوتاه
موتور کمپوند با اتصال شنت بلند موتور کمپوند با اتصال شنت کوتاه
موتور DC مغناطیس دائم
موتور مغناطیس دائم (PMDC) موتوری است که استاتور آن از مواد مغناطیس دائم ساخته شده است. مزایا
۱- به علت عدم نیاز به مدار میدان خارجی، هیچ گونه تلفات مسی در میدان
مغناطیسی وجود ندارد. ۲- به علت عدم نیاز به سیم پیچ میدان، این موتور می
تواند به میزان قابل توجهی کوچکتر باشد. معایب ۱- چون که
مغناطیس دائمی چگالی شار ضعیفتری از یک موتور تحریک خارجی شنت تولید می کند
از اینرو این موتور گشتاور کمتری را فراهم می کند. ۲- خطر مغناطیس زدایی
در اثر قرارگیری در دماهای زیاد یا عکس العمل عرضی آرمیچر (mmf آرمیچر )
وجود دارد. 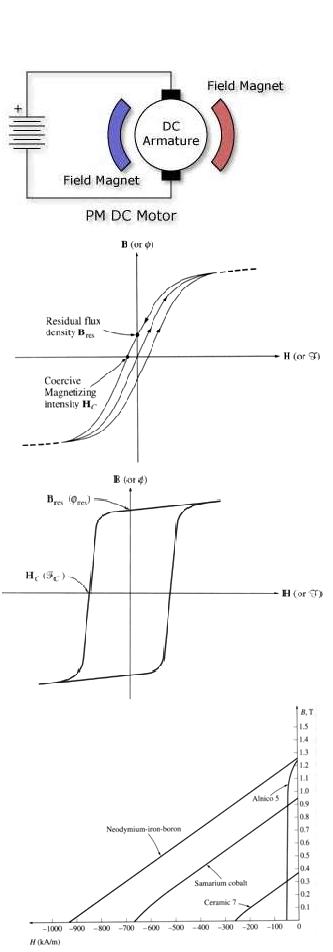
مغناطیس دائمی موتور DC
برای هسته موتورهای معمولی عموما از یک ماده فرومغناطیس با چگالی پسماند مغناطیسی کوچک استفاده می کنند. در حالی وضعیت مطلوب برای موتورهای PMDC وضعیت مطلوب استفاده از مواد مغناطیسی با چگالی پسماند مغناطیسی هر چه بزرگتر در قطبهای مغاطیسی آنها می باشد.
منحنی مغناطیس شوندگی و چگالی شار مواد مغناطیسی
یک مقایسه کلی از منحنی های مواد مغناطیس دائم که جدیدا توسعه اند با مواد مغناطیس دائم متداول آلیاژی (آلینکو ۵) نشان میدهد که مغناطیس ساخته شده از چنین موادی پس ماند مغناطیسی در حد بهترین هسته های ساخته شده از مواد فرومغناطیسی تولید می کنند. طراحی موتور مغناطیس دائم کاملا شبیه به طراحی موتورهای شنت یا تحریک مستقل میباشد البته با این تفاوت که در PMDC شار موتور ثابت است. در نتیجه تنها راه ممکن برای کنترل سرعت موتورهای PMDC کنترل ولتاژ آرمیچر است. موتورهای اونیورسال ویژگیها
- عمده موتورها از منبع تغذیه DC یا AC تغذیه می کنند و بعضی دیگر از هر دوی این منابع تغذیه میکنند.
- این نوع موتورها را موتورهای اونیورسال می گویند. از لحاظ ساختاری بسیار شبیه به موتورهای خود تحریک سری می باشند ، اما برای کارکرد با هر دو نوع منبع تغذیه DC و AC طراحی شده اند.
- اصولا سرعت بالایی دارند ( معمولا بیش از ۱۰۰۰۰ دور بر دقیقه)
- نسبت قدرت به وزن بالایی را ارائه می دهند.
- برای تجهیزات قابل حمل مثل دریلهای دستی و جاروبرقی ها بسیار مناسب می باشند.
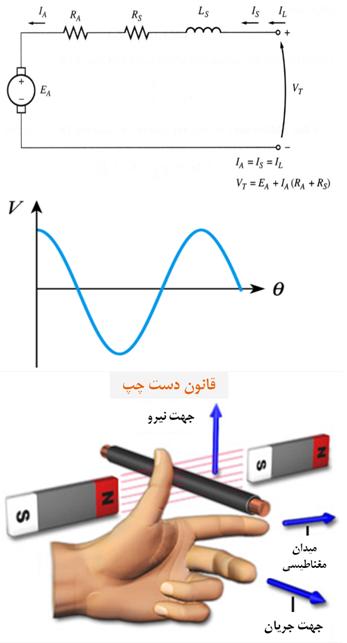 توجیه رفتار و عملکرد موتور اونیورسال
در قسمتهای قبلی همین مقاله توضیح دادیم که موتور DC با ولتاژ مستقیم کار
می کند. حال اجازه دهید همین موتور DC تحریک سری را که شماتیک آن در روبرو
آورده شده است به یک منبع ولتاژ AC متصل کنیم چه اتفاقی می افتد. انتظار
دارید نچرخد؟ منبع ولتاژ متناوب باعث معکوس شدن جریان در هر نیم سیکل در
سیم پیچی موتور می گردد. حال بیایید به قانون دست چپ الکتروموتور DC مجددا
نگاهی بیاندازیم. قبلا توضیح دادیم که طبق این قانون هنگامی جهت گردش موتور
تغییر می کند که جهت میدان مغناطیسی یا جریان گذرنده از آرمیچر تغییر کند.
در موتور سری هر دوی اینها با هم سری هستند و تعویض پلاریته که در کار با
ولتاژ متناوب در هر نیم سیکل رخ می دهد باعث تغییر جهت هر دو می شود و از
اینرو جهت دوران ثابت باقی می ماند و موتور می تواند در یک جهت گشتاور
تولید کرده و به دوران خود ادامه دهد. خیلی ساده به نظر می رسد. جهت کار در
ولتاز AC بهینه سازی هایی نظیر ورقه ورقه کردن هسته و … انجام شده است که
موتور را برای کار در هر دو نوع ولتاژ بهینه کرده است.
توجیه رفتار و عملکرد موتور اونیورسال
در قسمتهای قبلی همین مقاله توضیح دادیم که موتور DC با ولتاژ مستقیم کار
می کند. حال اجازه دهید همین موتور DC تحریک سری را که شماتیک آن در روبرو
آورده شده است به یک منبع ولتاژ AC متصل کنیم چه اتفاقی می افتد. انتظار
دارید نچرخد؟ منبع ولتاژ متناوب باعث معکوس شدن جریان در هر نیم سیکل در
سیم پیچی موتور می گردد. حال بیایید به قانون دست چپ الکتروموتور DC مجددا
نگاهی بیاندازیم. قبلا توضیح دادیم که طبق این قانون هنگامی جهت گردش موتور
تغییر می کند که جهت میدان مغناطیسی یا جریان گذرنده از آرمیچر تغییر کند.
در موتور سری هر دوی اینها با هم سری هستند و تعویض پلاریته که در کار با
ولتاژ متناوب در هر نیم سیکل رخ می دهد باعث تغییر جهت هر دو می شود و از
اینرو جهت دوران ثابت باقی می ماند و موتور می تواند در یک جهت گشتاور
تولید کرده و به دوران خود ادامه دهد. خیلی ساده به نظر می رسد. جهت کار در
ولتاز AC بهینه سازی هایی نظیر ورقه ورقه کردن هسته و … انجام شده است که
موتور را برای کار در هر دو نوع ولتاژ بهینه کرده است.
جهت دریافت فیلم آموزشی فارسی طراحی موتور الکتریکی کلیک کنید

بسته آموزشی فارسی آشنایی با موتور الکتریکی