انواع موتور بدون جاروبک شامل موتورهای القایی، مغناطیس دائم، سنکرون رلوکتانسی و سوئیچ رلوکتانس در این مقاله تشریح و مقایسه شده اند.

در این مقاله رهنمودهایی برای انتخاب بین موتورهای القایی، مغناطیس دائم، موتورهای سنکرون رلوکتانسی و موتورهای سوئیچ رلوکتانس ارائه شده است.
 مهندسین هنگامی که تصمیم به استفاده از موتور بدون جاروبک می گیرند
انتخاب های متعددی برای طراحی خود دارند. انتخاب اشتباه می تواند فرجام یک
طراحی را از یک طرح خوب به یک طرح متوسط تبدیل کرده و باعث شکست در بازار
فروش گردد. از اینرو تیم طراحی و مهندسی جهت اطمینان از انتخاب درست موتور
بدون جاروبک در پروژه خود می توانند از مطالب گرد آمده در این مقاله
استفاده کنند.
مهندسین هنگامی که تصمیم به استفاده از موتور بدون جاروبک می گیرند
انتخاب های متعددی برای طراحی خود دارند. انتخاب اشتباه می تواند فرجام یک
طراحی را از یک طرح خوب به یک طرح متوسط تبدیل کرده و باعث شکست در بازار
فروش گردد. از اینرو تیم طراحی و مهندسی جهت اطمینان از انتخاب درست موتور
بدون جاروبک در پروژه خود می توانند از مطالب گرد آمده در این مقاله
استفاده کنند.
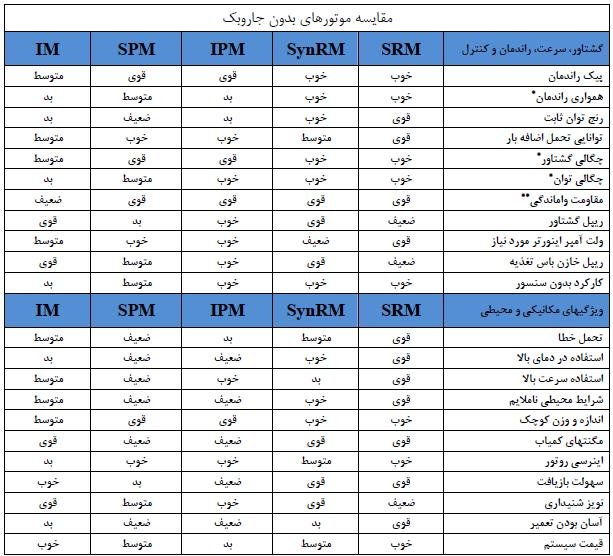
در این مقاله بصورت خلاصه مزایا و معایب عمده موتورهای بدون جاروبک در چهار گروه آمده و مقایسه شده است. این چهار گونه متداول عبارتند از: موتورهای ACالقایی (IM) ، موتورهای مغناطیس دائم (PMMs) ، موتورهای سنکرون رلوکتانسی (SynRMs) و موتورهای سوئیچ رلوکتانس (SRMs)
موتورهای AC القایی
موتورهای AC القایی (IM) از زمانهای گذشته اسب کاری صنایع بوده اند و این دلیل موجهی داشته است. آنها ترکیبی از عملکرد مناسب و سادگی هستند. و همچنین می توانند به صورت مستقیم از منبع تغذیه AC تغذیه شوند، ویژگیهایی که در گذشته بسیار مهم بود.

امروزه، پیشرفتهای صورت گرفته در الکترونیک قدرت و پردازش سیگنال دیجیتال تغییر سرعت موتورهای IM را کم هزینه کرده است. و الگوریتمهای کنترل مدرن موتورهای القایی را در جایی به کار گرفته است که قبلا موتورهای با جاروبک پرهزینه استفاده میشد. صرفه جویی انرژی منتج شده به طور فزاینده ای مزایای اقتصادی و زیست محیطی ارزشمندی ایجاد کرده است. برای همین است که موتورهای القایی کنترل شده در کاربردهای متنوع و جاهایی که هزینه خیلی اهمیت دارد مانند وسایل نقلیه الکتریکی و ماشین های لباسشویی به فراوانی یافت می شوند. و همچنین در کاربردهای صنعتی نظیر پمپها، فن ها، بلوورها و جابجایی مواد استفاده می شوند. یک موتور القایی از بر هم کنش میدان گردان استاتور با جریان القا شونده در هادیهای روتور گشتاور تولید می کند. اما این جریانها روتور را گرم کرده و راندمان و عمر یاتاقانها را کاهش میدهند. جایگزین کردن روتور دارای میله هادی آلومینیومی با نوع مسی تا حدی به حل مشکل کمک می کند اما این کار هزینه بر بوده و امکان دارد که دیگر نتوان موتور را مستقیما با برق شهر راه اندازی کرد. ثابت زمانی الکتریکی استاتور زیاد است. از اینرو برای اطمینان از پاسخ سریع به تغییرات در بار یا سرعت، معمولا موتور تا سرعت پایه (base) خود با شار مغناطیسی ثابت کار می کند. متاسفانه تلفات مغناطیسی صرفنظر از مقدار بار موتور ثابت است که این موضوع باعث راندمان پایین در بارهای سبک می شود. اگر پاسخهای کنترلی سریع حیاتی نباشد، برای حل مساله کاهش اتوماتیک شار استاتور در گشتاورهای پایین ممکن است. در سرعتهای بیش از سرعت پایه (base)، به علت محدودیت ولتاژ اعمالی شار استاتور تضعیف می گردد بنابراین موتور القایی کنترل شده نوعی، توان مکانیکی ثابت تحویل می دهد. راندمان بسرعت افت می کند، و همچنین اندوکتانس نشتی باعث می شود جریان روتور از میدان گردان عقب بیفتد و از اینرو جریان بیشتری برای یک گشتاور مفروض مورد نیاز است. در نتیجه، موتورهای القایی کنترل شده رنج محدودی برای سرعت توان ثابت (CPSR) در حدود ۲:۱ دارند. کاربردهایی مانند ماشینهای ابزار و حمل و نقل که نسبت CPSR بیشتری نیاز دارند، می توان نیاز آنها را با کاهش دادن تعداد دورهای سیم پیچ پاسخ داد. البته این کار باعث از دست دادن توانایی گشتاور زیاد در سرعتهای پایینتر شده و جریان استاتور را افزایش می دهد. جریانهای استاتور بالاتر نیاز به اینورتر گرانتر داشته و باعث کاهش راندمان نیز می شود. و کلام آخر اینکه راندمان درج شده در پلاک موتور IM برای کارکرد با موج سیسنوسی خالص منظور شده است. در دنیای واقعی، اینورترها پالسهایی را می فرستند که فقط تقریبی از جریان سینوسی هستند. تیمهای طراحی بایستی توجه کنند که راندمان کل سیستم (موتور و اینورتر) از راندمان حالت تک تک که برای موتور و اینورتر اعلام شده کمتر خواهد بود. افزایش فرکانس موج حامل کمک کننده است. اما منفعت ایجاد شده در عملکرد موتور، با هزینه تلفات اینورتر بیشتر بدست آمده است. یک راه حل- قرار دادن فیلترهایی بین اینورتر و موتور است که گران بوده و تلفات توان اضافه را تحمیل می کند. علاوه بر آن فیلترها نسبتا بزرگ هستند. اشکال دیگر موتورهای القایی این است که سیم پیچهای استاتور در محیط استاتور در شیارهای زیادی توزیع شده اند. این موضوع باعث بزرگ شدن پیشانی کلاف و به تبع آن اتلاف فضای داخل موتور و اتلاف انرژی الکتریکی می شود. استاندارد اروپایی جاری در این مورد (IEC60034) صریحا هر موتوری را که نیازمند کنترل الکترونیکی است مستثنی کرده است.
موتورهای مغناطیس دائم
موتورهای مغناطیس دائم (PMMS) از بر هم کنش جریانهای استاتور با مغناطیس دائم در داخل یا روی روتور گشتاور تولید می کنند. روتورهای مگنت سطحی (Surface rotor magnets) در موتورهای کوچک توان پایین مانند تجهیزات IT ، ماشینهای تجاری و تجهیزات کمکی اتوموبیل ها رایج هستند. موتور با مگنتهای درونی (IPM) در ماشینهای بزرگتر، مانند وسایل نقلیه الکتریکی و موتورهای صنعتی رایج هستند.

در PMMs، در صورتی که نوسان گشتاور چندان مهم نباشد استاتور می تواند از سیم پیچی متمرکز (گام کوتاه شده) استفاده کند. اما سیم پیچیهای توزیع شده روش متداول در PMMs های بزرگتر است. چون موتورهای مغناطیس دائم کموتاتور مکانیکی ندارند، برای کنترل جریان سیم پیچ نیاز به اینورتر دارند. بر خلاف بقیه موتورهای بدون جاروبک، PMMs برای ایجاد و نگهداری شار مغناطیسی نیاز به جریان ندارند. بنابراین، PMMsبیشترین گشتاور بر حجم موتور را ارائه می دهند و احتمالا بهترین انتخاب برای کاربردهایی است که اندازه کوچک و وزن کم، مهم و مطلوب است. عدم نیاز به جریان مغناطیس کننده همچنین باعث راندمان های بالاتر در بارهای بهینه می شود. یعنی جایی که موتورها بهترین عملکرد را دارند. بزرگترین اشکال مشهود PMM هزینه بالای آن است. PMMs کارامد از مگنتهای ساخته شده از فلزات انتقالی (transition metal) مانند نئودیوم و دیسپروسیوم استفاده می کنند. این مواد کمیاب بوده و از کشورهای که از لحاظ سیاسی ناپایدار هستند تامین می شود. که باعث می شود قیمتها بالا و ناپایدار باشد. از این گذشته، اگرچه مغناطیس دائمها مزیت عملکرد در سرعتهای پایین را دارند اما آنها یک ” پاشنه آشیل” تکنیکی دارند. برای مثال، با افزایش سرعت PMMs، نیروی ضد محرکه مغناطیسی (Back EMF) به ولتاژ منبع اینورتر رسیده و بعد از آن نمی توان جریان سیم پیچی را کنترل کرد. این مساله سرعت پایه یک PMM را تعیین می کند. و در طراحی های مغناطیس سطحی معمولا بیانگر حداکثر سرعت ممکن در تغذیه با یک منبع ولتاژ مفروض است. در سرعتهای بالاتر از سرعت پایه ،IPMs از تضعیف کنندگی شار فعال استفاده می کنند. که در آن جریان استاتور به گونه ای دستکاری می شود که عمدا شار مغناطیسی کم شود. رنج سرعتی که که این کار میتواند به صورت مطمئن انجام شود حدودا به ۴:۱ محدود شده است. مانند قبل، این محدودیت میتواند با کاهش تعداد دور سیم پیچی و به تبع آن، پذیرفتن افزایش هزینه و تلفات در اینورتر برطرف شود. نیاز به تضعیف کنندگی شار وابسته به سرعت بوده و تلفات مرتبط وابسته به مقدار گشتاور نیست. این موضوع راندمان را در سرعتهای بالا و مخصوصا در بارهای سبک کاهش می دهد. که در وسایل نقلیه الکتریکی مهم است. جایی که راندن با سرعت در بزرگراه تضعیف کنندگی شار را اجتناب ناپذیر می کند. PMMs برای وسایل نقلیه الکتریکی مساعد هستند. اما مزیت راندمان هنگامی که سیکلهای رانندگی در دنیای واقعی محاسبه شوند جای تامل دارد. در یادداشتی ذکر شده است که اقلا یک تولیدکننده مهم وسایل نقلیه الکتریکی موتورهای القایی را با موتورهای مغناطیس دائم جایگزین کرده است. عیب دیگر PMMs این است که مدیریت آنها تحت شرایط خطا به علت Back-EMF ذاتی آنها مشکل است. تا هنگامی که موتور می چرخد جریان به صورت پیوسته در سیم پیچهای تحت خطا برقرار است. حتی اگر اینورتر جدا شده باشد. که باعث ایجاد گشتاور cogging و گرم شدگی زیاد شده که هر دوی اینها می توانند خطرناک باشند. از دست رفتن تضعیف کنندگی شار در سرعتهای بالا، برای مثال، به علت خاموش شدن اینورتر، باعث تولید ولتاژ کنترل نشده می شود و پیرو آن ممکن است ولتاژ باس DC به مقادیر خطرناکی برسد. دماهای عملیاتی محدودیت قابل توجه دیگر برای همه PMMs به جز آنهایی که با مگنتهای ساماریوم-کوبالت ساخته شده اند است. و جریان زیاد موتورها، که به علت خطای اینورتر رخ میدهد می تواند باعث مغناطیس زدایی مواد مغناطیسی شود. حداکثر سرعت برای PMMs با توجه به مشکل نگهداشت مکانیکی مگنتها محدود شده است. اگر PMM آسیب ببیند تعمیر کردن آن به علت مشکل بیرون کشیدن و کار با روتور مستلزم بازگرداندن آن به کارخانه است. در پایان، بازیافت آنها در پایان عمرشان پر زحمت است. با وجود این مقادیر زیاد این مواد از لحاظ اقتصادی این کار را به صرفه و تداوم پذیر کرده است. با وجود تمام معایب، PMMs در شرایط سرعت پایین و راندمان های بهینه غیر قابل جایگزین هستند و همچنین هنگامی که اندازه و وزن مهم و حیاتی است، مفید هستند.
موتورهای سنکرون رلوکتانسی
موتورهای سنکرون رلوکتانسی مدرن (SynRMs) همیشه با اینورتر تغذیه می شوند. و مانند موتورهای القایی سیم پیچی توزیع شده دارند. اما روتورها فولاد ورقه شده با شیارهای سوراخ شده هستند. بنابراین به راحتی در یک محور مغناطیس شده و در محور دیگر به مقداری کمتر مغناطیس می شود. تمایل این روتورها برای قرار گرفتن در امتداد میدان گردان استاتور باعث تولید گشتاور می شود. مشابه یک مغناطیس دائم، SynRMs خود-سنکرون هستند. به این معنی که اینورتر سنکرون و همزمان با زاویه و سرعت روتور، استاتور را تحریک می کند. مزیت اصلی موتورهای سنکرون رلوکتانسی تلفات ناچیز روتور آنها در مقایسه با موتورهای القایی است. از اینرو با طراحی و کنترل دقیق، SynRMs قادر خواهد بود استاندارد اروپایی موتور راندمان بسیار بالای IE4 و استانداردهای راندمان خیلی زیاد NEMA را بدون نیاز به مگنت پوشش دهد. کاهش حرارت در SynRM گشتاور و چگالی توان را در مقایسه با موتورهای القایی بهبود داده است. و نوعا اجازه می دهد که برای یک توان خاص اندازه فریم یک سایز کوچکتر باشد. این موتورها به علت ریپل گشتاور و میزان لرزش ناچیز خود کم صدا هستند. یکی از ضعفهایSynRMs ضریب توان پایین آنها در مقایسه با موتورهای القایی است. از اینرو برای یک مقدار معین توان مکانیکی، جریان اینورتر بیشتری نیاز دارند. و متعاقب آن هزینه ها و تلفات توان اینورتر افزایش می یابد. بنابراین، اگر چه موتورSynRM احتمالا فقط راندمان خوبی دارد مزیتهای آن در سطح سیستم کمتر قانع کننده است. استانداردها فعلا فقط در مورد راندمان موتورها بحث می کنند. ولی طراح بایستی به دقت بر روی عملکرد کل سیستم بحث و بررسی کند. نیاز به لمینیشن های روتور پیچیده با موانع شار سوراخ شده، تولید روتورهای SynRM را مشکل کرده است. تا حدی شکننده و آسیب پذیر بوده و به این دلیل برای کاربرد در سرعتهای بالا نامناسب هستند. موتورهای سنکرون رلوکتانسی به خوبی برای رنج وسیعی از کاربردهای صنعتی که به اضافه بار زیاد و سرعت زیاد نیاز ندارند منطبق شده اند. و به علت راندمان آنها بطور فزاینده ای برای پمپهای با سرعت متغیر عرضه می شوند.
موتورهای سوئیچ رلوکتانس
موتورهای سوئیچ رلوکتانس (SRMs) بوسیله جذب شدن مغناطیسی یک روتور برجسته به میدان استاتور گشتاور تولید می کنند. استاتورهای SRM، به این ترتیب تعداد قطبهای نسبتا کمی دارند. روتور نیز به مراتب ساده تر از روتور موتور سنکرون رلوکتانسی است. تفاوت در تعداد قطب استاتور و روتور باعث اثر ورنیر (vernier) می شود. موتور سوئیچ رلوکتانس معمولا در جهت معکوس و در سرعتی متفاوت از میدان استاتور می چرخد. بر خلافSynRMs ، موتورهای سوئیچ رلوکتانس معمولا از تحریک DC پالسی استفاده می کنند و بنابراین برای کار کردن آنها نیاز به اینورترهای مخصوص است.
برای نگهداشت میدان مغناطیسی موتور سوئیچ رلوکتانس به مقداری جریان نیاز است. که باعث چگالی گشتاور پایین تر و راندمان بهتر در سرعتهای مطلوب در مقایسه با مغناطیس دائمها می شود. در هر صورت، مانند SynRMsیک موتور سوئیچ رلوکتانس در مقایسه با موتور القایی هم توان خود، یک فریم سایز کوچکتر است. مزیت اصلی موتورهای سوئیچ رلوکتانس این است که تضعیف کنندگی شار بطور طبیعی هنگامی که تحریک کاهش یابد، رخ می دهد بدون اینکه راندمان کاهش یابد. این به نوبه خود CPSR عریضی ایجاد می کند. CPSR بزرگتر از ۱۰:۱بدون هیچ مشکلی بدست می آید. راندمان در سرعتهای بالا و بارهای سبک خوب باقی می ماند. و موتور سوئیچ رلوکتانس قادر است راندمانهای فوق العاده ثابتی را در سرتاسر رنج وسیعی از شرایط کاری تحویل دهد. SRMs به میزان قابل توجهی می توانند خطای ایجاد شده را تحمل کنند. بدون مگنت، گشتاور کنترل نشده ای وجود ندارد. در سرعتهای بالا در سیم پیچ تحت شرایط خطا، جریان غیر کنترل شده تولید نمی شود. گذشته از این، چونکه فازهای SRMاز لحاظ الکتریکی مستقل هستند. اگر مطلوب باشد در صورت عمل نکردن یک و یا تعداد بیشتری از فازها موتور همچنان می تواند با تحمل ریپل گشتاور، توان خروجی کمتری بدهد و بار را به گردش درآورد. این خصوصیت در صورتی که طراح بخواهد تحمل خطا افزایش یابد، می تواند مفید باشد. ساختمان ساده موتورهای سوئیچ رلوکتانس آنها را بادوام و تولید آنها را ارزان کرده است. نیازی به مواد گران قیمت نیست روتور استیل ساده به خوبی با سرعتهای بالا و محیط های ناملایم منطبق شده است. و پیچکهای کوتاه شده در استاتور ریسک اتصالی سیم پیچها را کاهش میدهد. گذشته از این، سر کلاف هم کوتاه می شود. از اینرو،SRMs فشرده بوده و در آنها از تلفات غیر ضروری اجتناب می شود. ضریب توان موتورهای سوئیچ رلوکتانس کمتر از PM یا موتورهای القایی است. اما اینورتر نیاز ندارد برای کارکرد کارآمد و مناسب موتور، با ترکیب سوئیچ زنی یک موج سینوسی ایجاد کند. از اینرو فرکانسهای کلیدزنی اینورتر و تلفات مربوط به آن کم است. ایراد اصلی SRM نویز شنیداری و لرزش (vibration) آن است. این مشکل می تواند از طریق طراحی مکانیکی دقیق، کنترل الکترونیکی، و نحوه به کارگیری آن توسط طراح ماشین آلات تا حدودی کنترل شود. موتورهای سوئیچ رلوکتانس به خوبی در رنج وسیعی از کاربردهای مختلف منطبق شده اند. و به علت توانایی تحمل گشتاورهای اضافه بار و تغییرات بزرگ در گشتاور بار. بطور فزآینده ای در کارهای سنگین جابجایی مواد استفاده می شوند توانایی اضافه بار زیاد و دارا بودن محدوده عریض سرعت در حالت توان ثابت این موتورها را برای خودروهای کشنده مناسب کرده است. نه فقط برای تجهیزاتی که در بزرگراه رفت و آمد نمی کنند (تراکتور و ادوات کاری دیگر) بلکه برای اتوموبیلها نیز مناسب هستند. حوزه ای که این موتورها هنوز فراگیر و معروف نشده اند. این موضوع شاید به دلیل نگرانیهای مرتبط با نویز شنیداری و ریپل گشتاور باشد. در جدول زیر مباحث مطرح شده جهت مقایسه به صورت خلاصه آورده شده است.
دانلود فایل
































